A continuación se describen brevemente los parámetros de configuración del Giro Automático. Para más información, revisar el extracto del Manual de Usuario y el video incluidos al final.

Velocidad máxima de giro
El equipo sólo permitirá ejecutar un giro automático cuando la velocidad del vehículo sea menor o igual a la configurada.
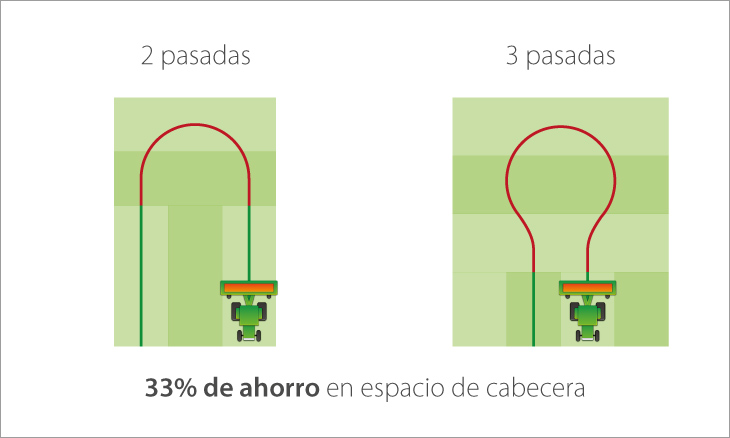
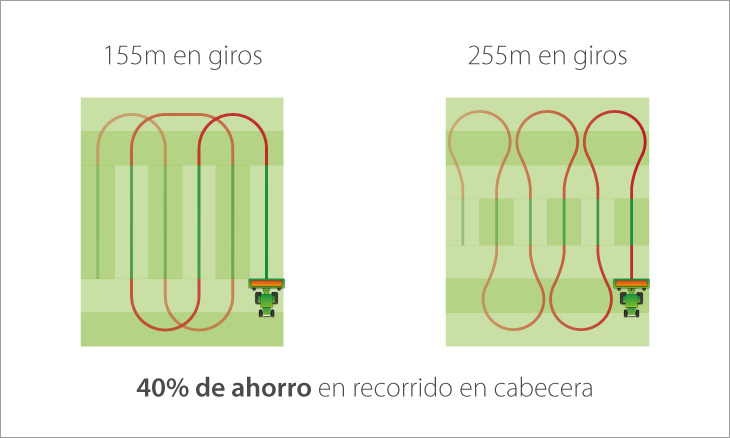
Saltar pasadas
Es la cantidad por defecto de pasadas que se dejará entre la de origen y la de destino al llevar a cabo un giro automático. De ser necesario, el número de pasadas a saltar puede ser modificado en la pantalla de trabajo antes de la realización de cada giro, pero volverá a este valor al finalizar el giro.
Giro inicial
Es el sentido de giro que se configurará por primera vez al iniciar el equipo.
——————————————————————————————————————————————

Radios de giro Derecho/Izquierdo
El Radio de giro es el mínimo radio con el que el vehículo puede girar. Este valor está determinado por:
Este parámetro debe ser configurado mediante la calibración; no debe ser ingresado a mano, para no comprometer la seguridad y la integridad, tanto del conductor como del vehículo.
——————————————————————————————————————————————

Velocidad de actuador
Representa la máxima velocidad con la que el actuador (p.ej., el motor DD) es capaz de girar las ruedas del vehículo.
Lookahead de actuador
Es una medida del retardo en el control de la actuación. Se utiliza para ajustar la entrada y la salida del giro.
Agresividad de actuador
Equivale a la agresividad para el guiado en recta. Se utiliza para reducir las oscilaciones rápidas de la dirección a bajas velocidades.
——————————————————————————————————————————————

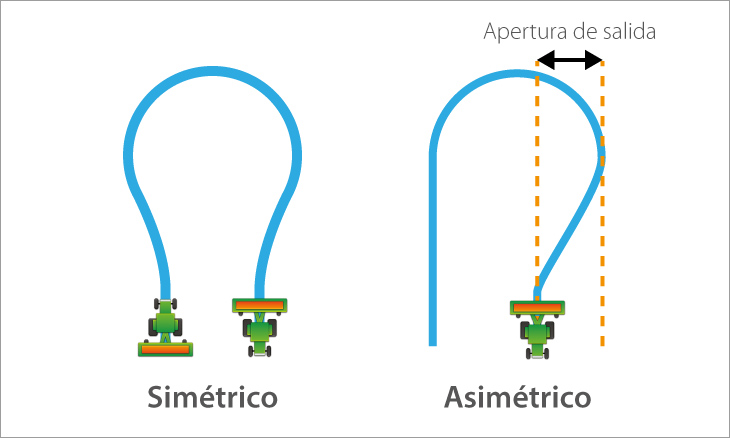
Giro simétrico
Determina la simetría de la trayectoria del giro. Como regla general, se deshabilita el giro simétrico sólo para Tractor+Implemento.
Apertura de salida
Es la distancia que el vehículo se abrirá respecto de la pasada a la salida del giro. Se utiliza para garantizar que al finalizar el giro, el implemento quede alineado con el vehículo.
——————————————————————————————————————————————
El siguiente video ilustra lo descripto anteriormente:
 Documentación
Documentación